
 いよいよ、ディープラーニングの基礎に入っていきます。
いよいよ、ディープラーニングの基礎に入っていきます。
引き続き「はじめてのディープラーニング(我妻幸長[著])」を使用して学んでいきます。
1.モデル
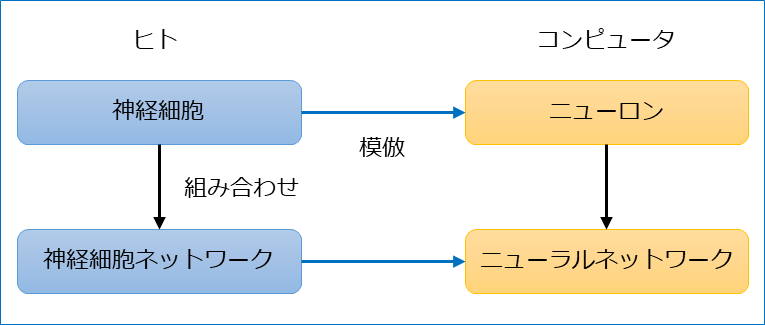
ニューロンとニューラルネットワークのモデルを示して説明をまとめていきます。
最初にニューラルネットワークのもとになった神経細胞ネットワークとの関係性から。
(1) ニューロンのモデル
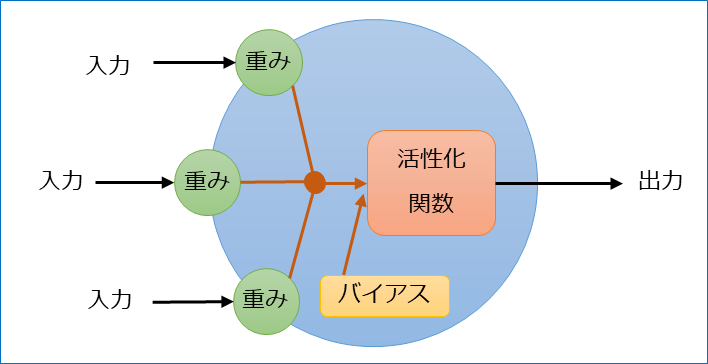
●ニューロンは複数の入力を受け取る
●入力に対応した重みが存在し、入力に掛け合わせて重要度をコントロールする(神経細胞でいうところの伝達効率)
●ニューロンはバイアスを定数で持ち、ニューロン自身の重要度をコントロールする(いわば感度。感度がいいと影響を与えやすい)
●重みを掛けた入力とバイアスが活性化関数に渡され、その結果がそのニューロンの出力となる(※1)
※1.
入力をx、重みをw、バイアスをb、入力数をnとすると、活性化関数に入力する値uは
\(u=\sum_{k=0}^{n}(x_{k}w_{k})+b\)
となる(入力と重みを掛けたものの総和にバイアスを足した値)。
出力をy、活性化関数をf(u)とすると
\(y=f(u)=f(\sum_{k=0}^{n}x_{k}w_{k})+b)\)
となる。
(2) ニューラルネットワークのモデル
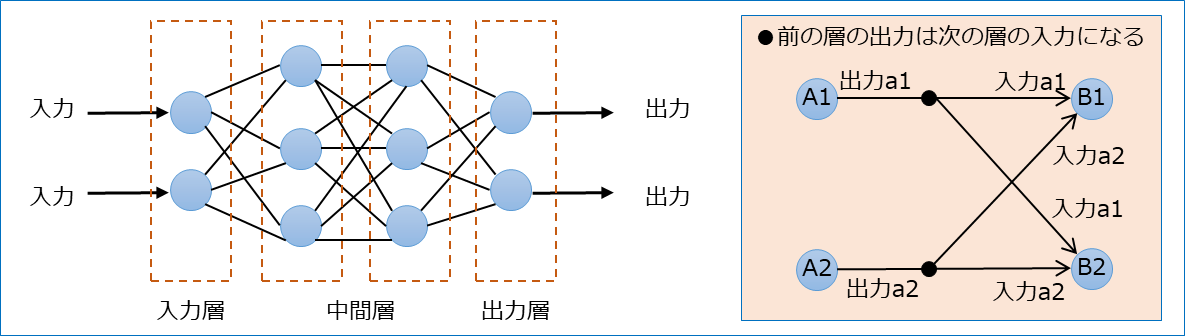
●ニューロンを層上に並べる。
●各ニューロンの出力は次の層のすべてのニューロンに入力として伝達される。
●入力を受け取る層を入力層、最終的な出力を行う層を出力層、入力層と出力層の間の層を中間層(隠れ層)という。
●入力→出力の流れを順伝播(フォワードプロパゲーション)、出力→入力の流れを逆伝播(バックプロパゲーション)という。
●逆伝播はネットーワークを学習させるときに行われる。
●1つの層における、活性化関数入力値uと出力yを数式であらわす。(※1)
※1.
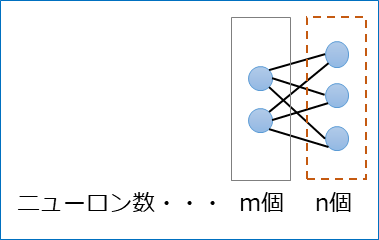
その層のニューロン数をn個とすると、uとyはn個存在するので、ベクトルとなり、以下のようにあらわす。
\((u_{1},u_{2},…,u_{n})=\vec{u}\)
\((y_{1},y_{2},…,y_{n})=\vec{y}\)
その層の1つ前のニューロン数をm個とすると\(\vec{u}\)と\(\vec{y}\)は前述のニューロンのモデルから以下のようにあらわせる。
\(\vec{u}=(\sum_{k=0}^{m}(x_{k}w_{k1})+b_{1}, \sum(x_{k}w_{k2})+b_{2}, … , \sum(x_{k}w_{kn})+b_{n})\)
\(\vec{y}=f(\vec{u})=(f(\sum_{k=0}^{m}(x_{k}w_{k1})+b_{1}), f(\sum(x_{k}w_{k2})+b_{2}), … , f(\sum(x_{k}w_{kn})+b_{n}))\)
入力\(\vec{x}\)、バイアス\(\vec{b}\)、重みW(重みはm×nのため行列になる)は以下のようにあらわせる。
\(\vec{x}=(x_{1},x_{2},…,x_{m})\)
\(\vec{b}=(b_{1},b_{2},…,b_{n})\)
\(W=\left(\begin{array}{cccc}w_{11}& w_{12}& …& w_{1n}\\w_{21}& w_{22}& …& w_{2n}\\…& …& …& …\\w_{m1}& w_{m2}& …& w_{mn}\end{array}\right)\)
※行に入力数、列にニューロン数。(1つのニューロンにm個の入力があるということ)ちなみにuの計算をPythonで記述すると以下になる。
u = np.dot(x, w) + b
2.問題
ニューラルネットワークで解決する題目を問題という。
大きく2種類に分かれる。
| 種類 | 内容 | 出力数 |
|---|---|---|
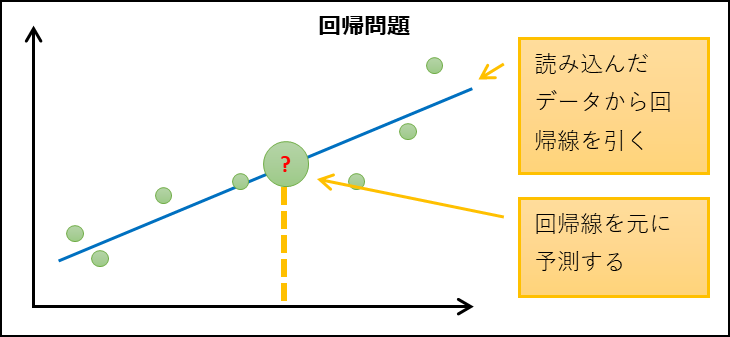
| 回帰問題 | 連続的な数値を予測する | 1つ |
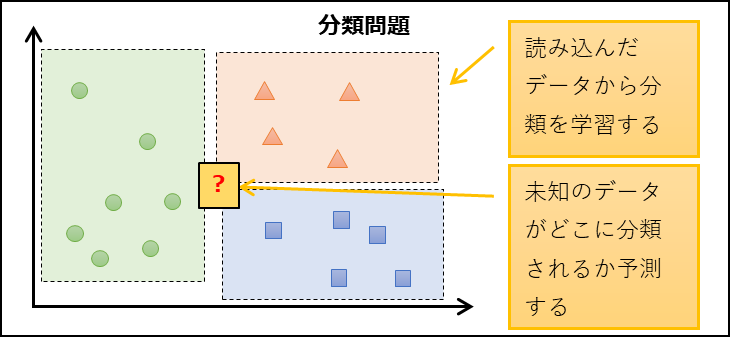
| 分類問題 | 分類分けを行う | 分類する数 |
3.活性化関数
※関数自体の説明のため、入力はx、出力はyであらわしているが、実際の入力は活性化関数入力値なのでxでなくuの方がわかりやすいかもしれない。
関数名「ステップ関数」
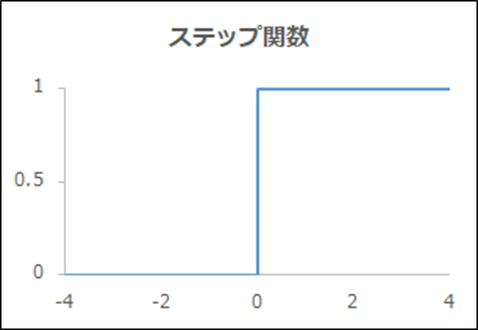
| 概要 | 0か1 |
|---|---|
| 出力y | 0 (x≦0)、1 (x>0) |
| 導関数y’ | 0 |
| メリット、デメリット | 実装が簡単だが、0と1の中間が表現できない。微分できないので、ニューラルネットワークでは使用できない |
関数名「シグモイド関数」
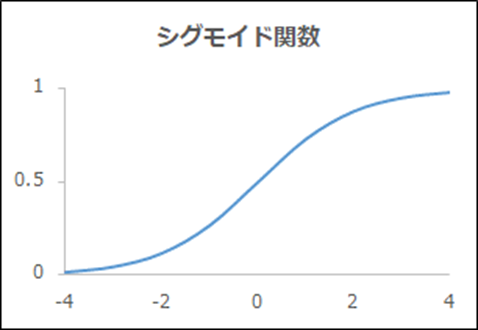
| 概要 | 0と1の間を滑らかに変化 |
|---|---|
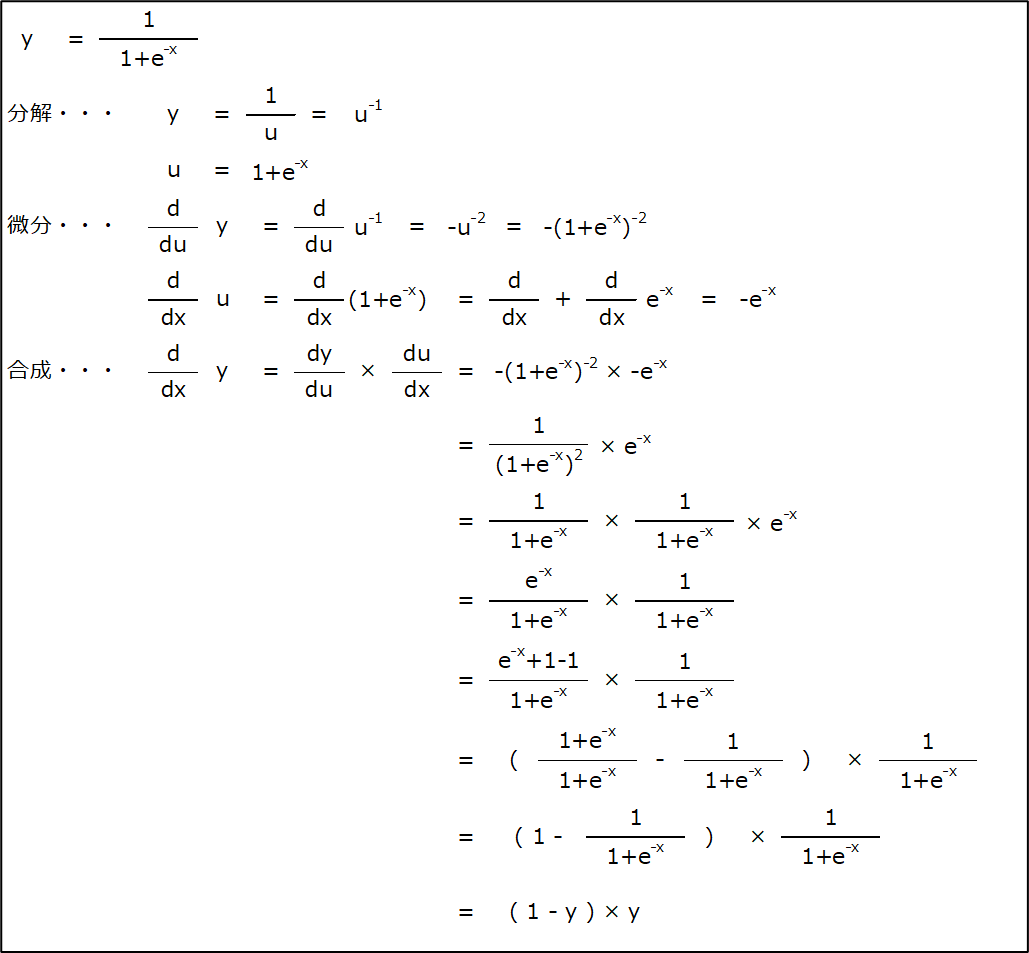
| 出力y | \(\frac{1}{1+exp(-x)}\) |
| 導関数y’ | \((1-y)y\) |
| メリット、デメリット | 微分が扱いやすい(=ニューラルネットワークで実装しやすい) |
関数名「tanh」
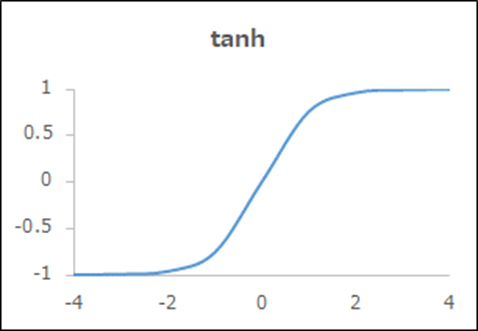
| 概要 | -1と1の間を滑らかに変化 |
|---|---|
| 出力y | \(\frac{exp(x)-exp(-x)}{exp(x)+exp(-x)}\) |
| 導関数y’ | \(\frac{4}{(exp(x)+exp(-x))^{2}}\) |
| メリット、デメリット | 0を中心とし、バランスがいい |
関数名「ReLU(ランプ関数)」
pic.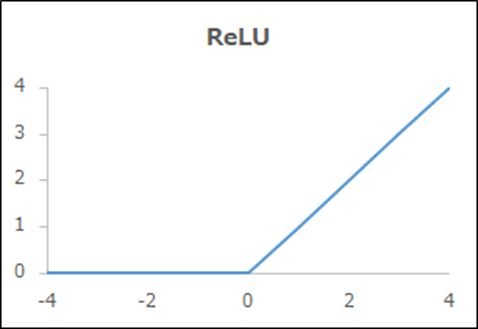
| 概要 | 正のみy=x |
|---|---|
| 出力y | 0 (x≦0)、x (x>0) |
| 導関数y’ | 0 (x≦0)、1 (x>0) |
| メリット、デメリット | シンプルで層が多くなっても安定した学習が可能 |
関数名「Leaky ReLU」
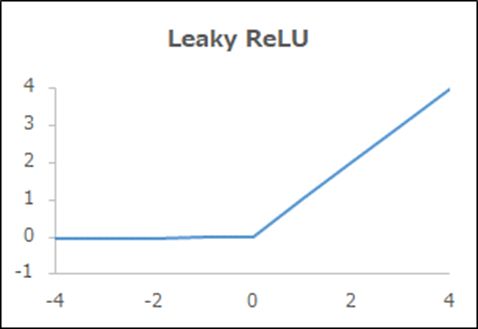
| 概要 | ReLUが負でもわずかに変化 |
|---|---|
| 出力y | 0.01x (x≦0)、x (x>0) |
| 導関数y’ | 0.01 (x≦0)、1 (x>0) |
| メリット、デメリット | 負でも学習が進む |
関数名「恒等関数」
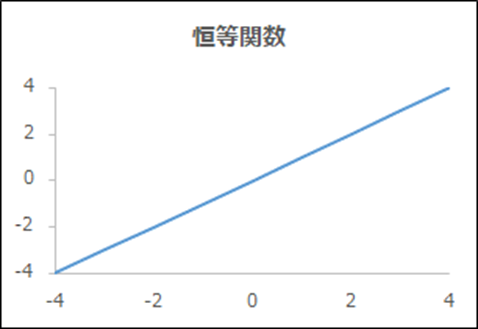
| 概要 | そのまま返す |
|---|---|
| 出力y | x |
| 導関数y’ | 1 |
| メリット、デメリット | 制限のない連続値のため回帰問題に適している |
関数名「ソフトマックス関数」
| 概要 | 出力の合計が1 |
|---|---|
| 出力y | \(\frac{exp(x)}{\sum_{k=1}^{ニューロン数}exp(x_{k})}\) |
| 導関数y’ | \(exp(x)\) |
| メリット、デメリット | 出力が0~1で合計が1なので分類問題に適している |
※シグモイド関数の微分を求めてみる
4.単一ニューロンによる処理(p124)について試してみた
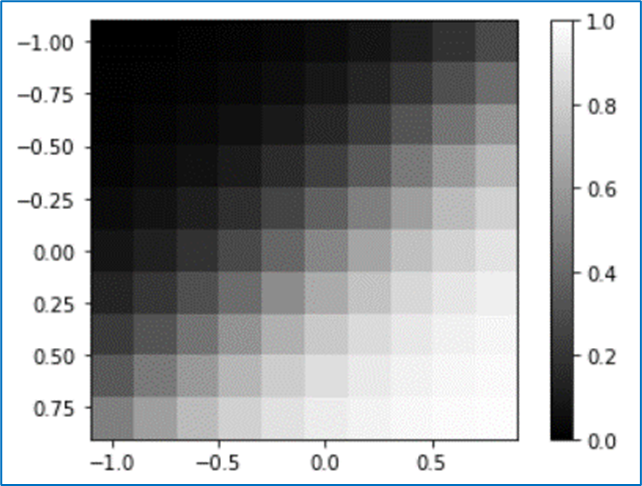
(1) 書籍通り(シグモイド関数)
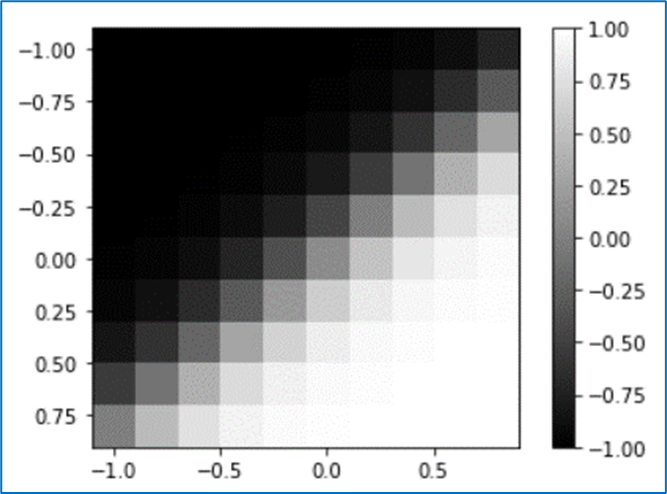
(2) tanh
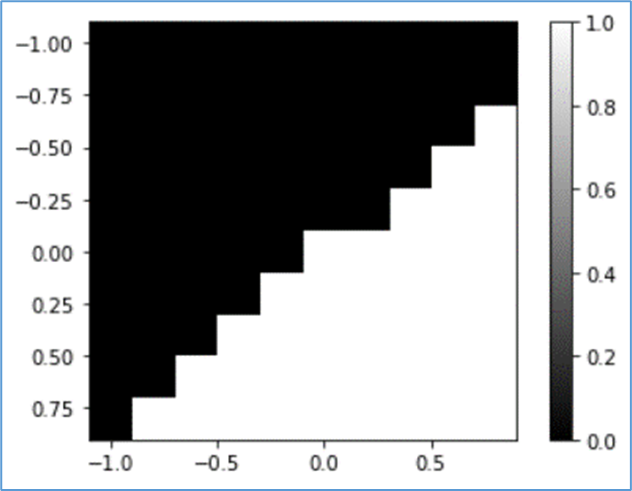
(3) ステップ関数
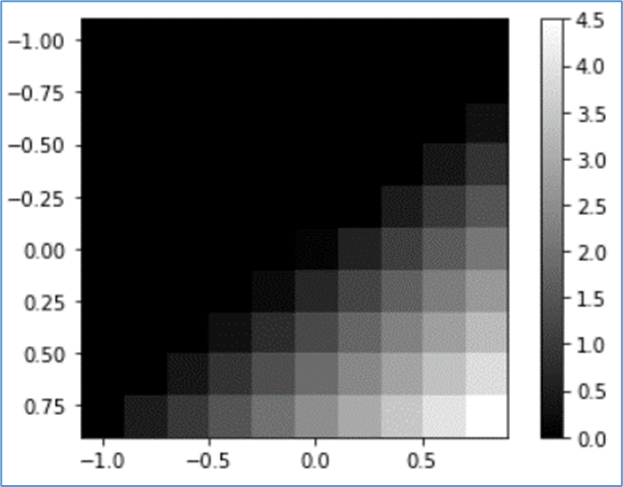
(4) ReLU
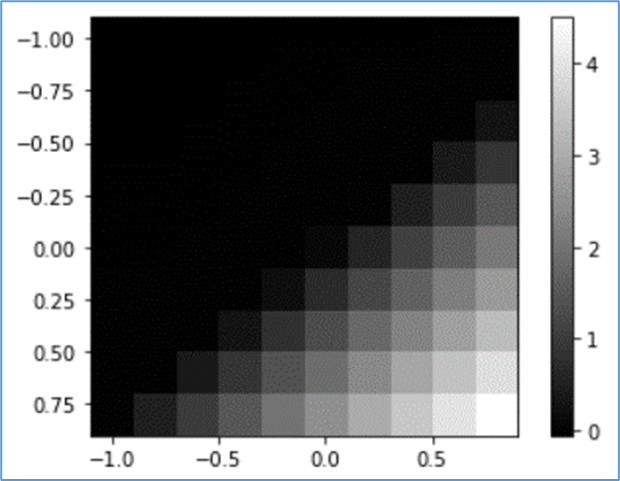
(5) Leaky ReLU
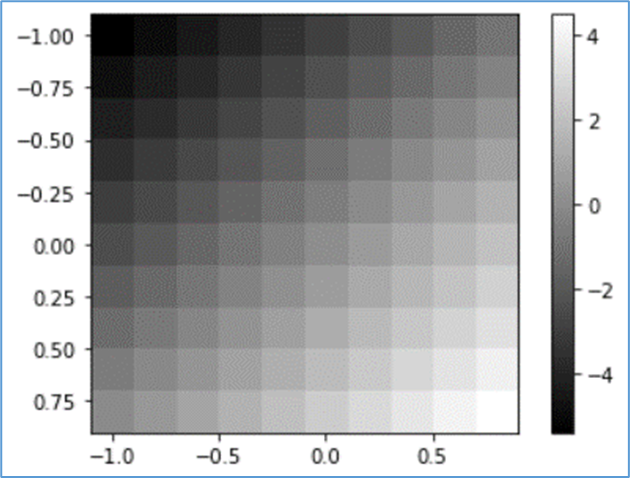
(6) 恒等関数
(7) 重みをX軸、Y軸の両方ともマイナス
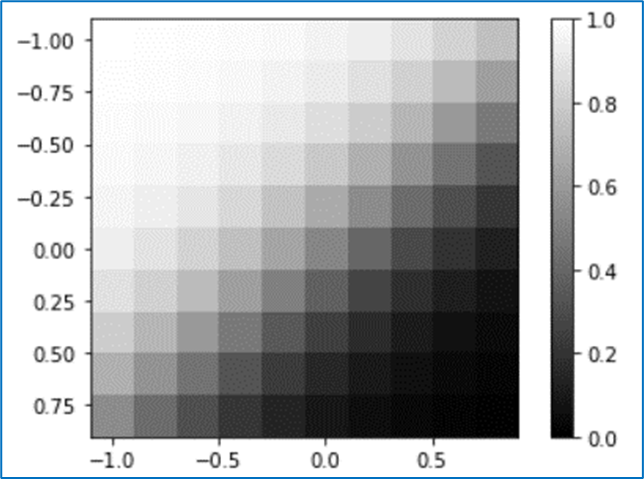
グラデーションが逆転した。
(8) 重みをX軸のみマイナス

X軸方向のみ逆転した。
(9) バイアスをマイナス
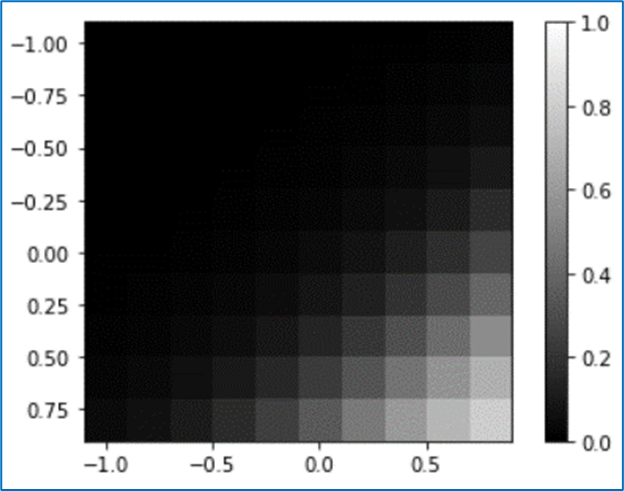
全体的に黒っぽくなった(出力が全体的に小さくなった)。
(10) バイアスをプラスで大きく
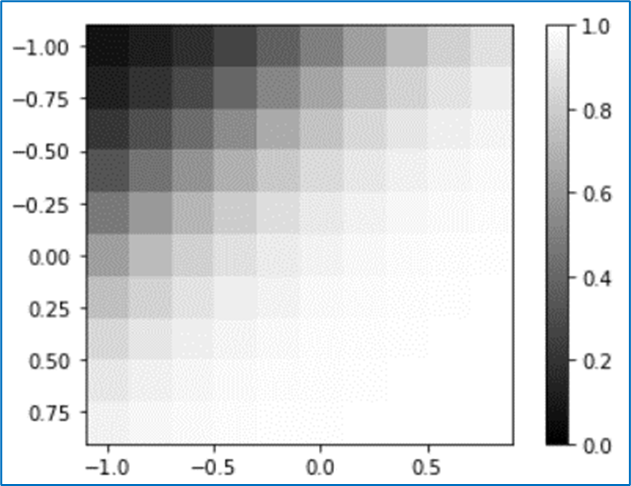
全体的に白っぽくなった(出力が全体的に大きくなった)。